Un traineau pour Etienne
Mission
L’année dernière Etienne, pour qui Gérard a fabriqué une paire d’Equilibras, « faisait » du ski de fond dans une poussette équipée d’un kit de skis à la place des roues et tractée par sa maman.
Etienne a grandi et cette année la poussette est trop petite, et il est installé dans un fauteuil roulant de petite taille. Claire, sa maman, nous a contactés pour trouver une solution lui permettant de « skier » en famille.
Une première séance de remue méninges avec elle nous a permis de bien cerner le besoin d’Étienne et d’envisager des pistes avec le matériel dont nous disposions, dans un premier temps.
A l’issue de ce travail de concertation c’est la solution d’un traîneau sur lequel serait fixé le nouveau fauteuil roulant d’Etienne qui a été privilégiée.
Solution
Une paire de skis de randonnée, récupérés pour leur légèreté, deux traverses en tube d’aluminium pour les relier, les brancards et le harnais déjà en possession de Claire nous ont permis de réaliser rapidement un appareil juste avant les vacances de Noël.


Les deux fils conducteurs, contradictoires, de la conception ont été la légèreté et la solidité.
- Légèreté pour réduire les efforts de l’adulte accompagnant Etienne, bien souvent sa maman,
- Solidité parce que contrairement à d’autres appareils que nous avons réalisés nous ne serons pas disponibles à proximité d’Etienne pendant ses randonnées et qu’un aléa sur les pistes peut devenir inconfortable, sinon dangereux, pour lui et la famille.

Le retour d’expérience des nombreuses sorties réalisées pendant les vacances de Noël a été concluant.
Aucun aléa, que de la joie et de la bonne humeur en famille et même l’amusement des skieurs qui ont croisé cet attelage un peu surprenant sur les pistes de ski de fond.
Etienne et toute la famille sont prêts à renouveler leurs exploits en février !
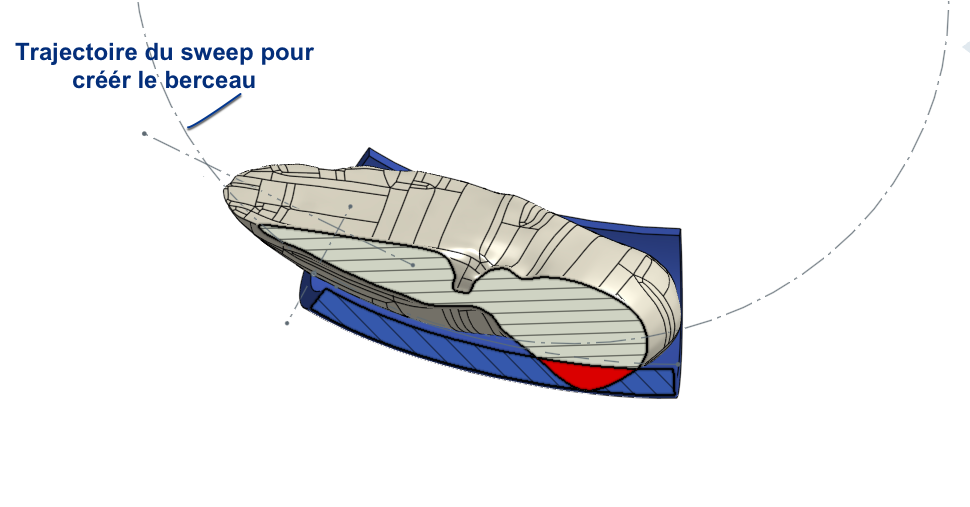
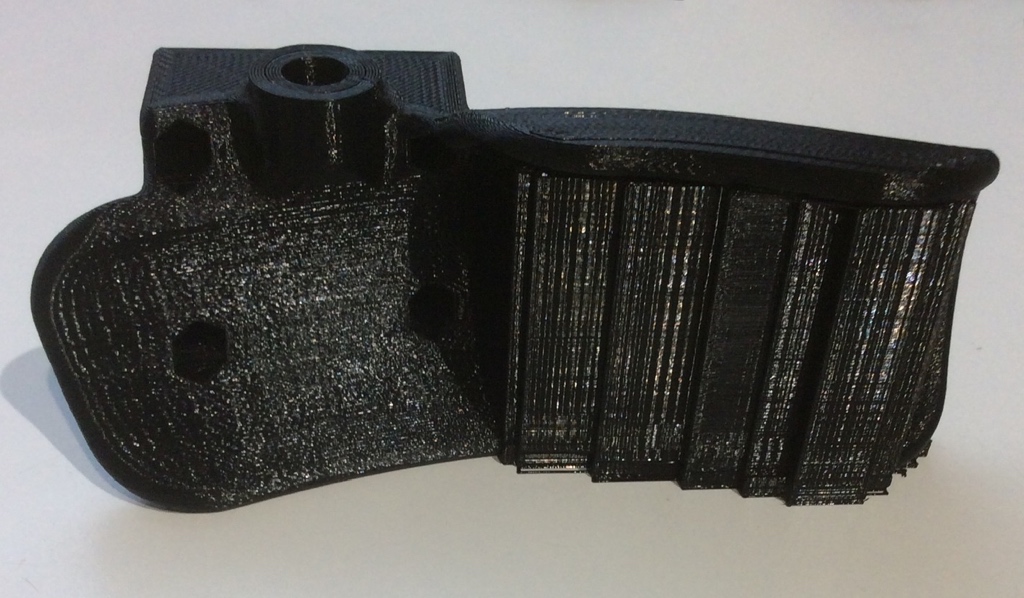
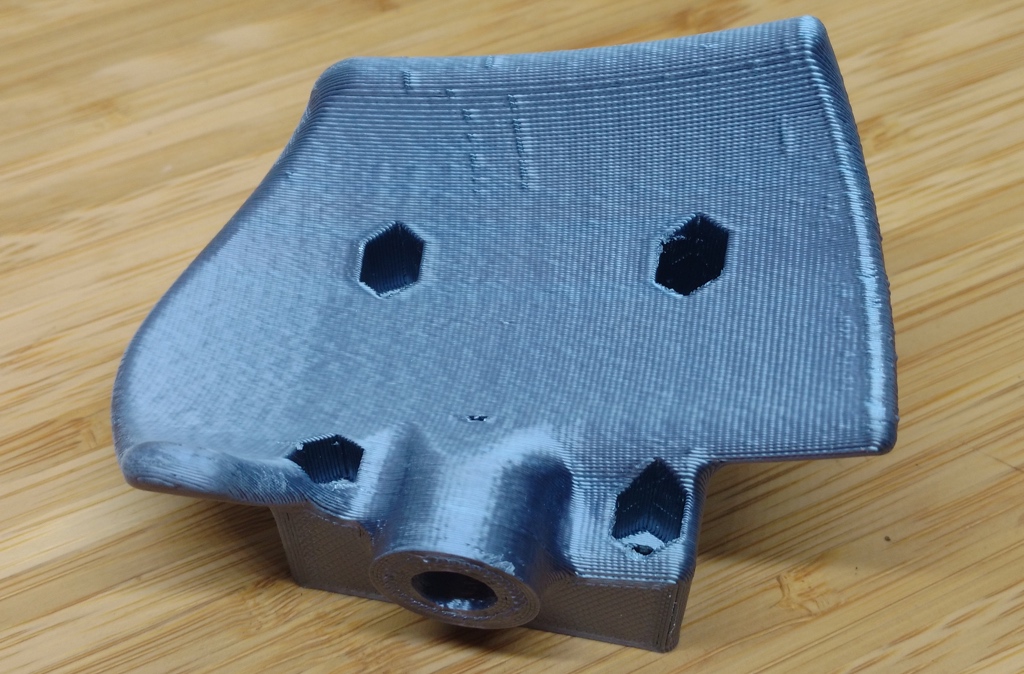
Un peu de technique
Les explications détaillées du déroulement du projet, de la conception à la fabrication de ce traineau sont publiées dans l’article du wiki du LOGre
Pour rappel : les membres de la team Gre-nable sont membres du hackerspace grenoblois : Laboratoire Ouvert Grenoblois