
Qui est Matteo ?
Son agénésie
Mattéo est un enfant tout à fait comme les autres. Il est juste né avec une partie du bras droit seulement. Son avant-bras s’arrête en effet environ aux 2/3 de la longueur, il n’a donc pas de poignet, main ou doigts. Mais comme probablement la plupart des enfants dans ce type de situation, Mattéo a appris à vivre, à se débrouiller avec sa main gauche et son bras droit, il fait du vélo, écrit à l’école comme les autres enfants, fait du judo dans un club, etc… Donc cette prothèse qu’il nous demande n’est absolument pas vitale pour lui, elle ne sera qu’une aide dans certaines situations lorsqu’il en ressentira le besoin.

Quel modèle de prothèse ?
Les plupart des prothèses conçues et réalisées par les makers de e-Nable sont destinées à des enfants disposant d’un poignet et d’une partie de la paume de la main, mais « amputés » des doigts. Les modèles classiquement adaptés à ces pathologies sont donc des modèles tels que Raptor Reloaded ou Phoenix. La plupart des makers impriment les modèles disponibles, avec une mise à l’échelle, quelques adaptations et une décoration selon les goûts de l’enfant.
D’autres makers proposent régulièrement des améliorations ou approches différentes comme par exemple la Flexy hand. Tous ces modèles utilisent un mouvement de flexion du poignet de l’enfant pour tirer sur des câbles, ce qui permet de fléchir les doigts afin d’obtenir le mouvement de préhension du pouce opposé aux 4 autres doigts de la prothèse.
Mais pour Mattéo, qui n’a pas de poignet, il nous a été proposé de partir d’un modèle mis au point par un binôme d’anglais, Drew Murray et Stephen Davies, le Unlimbited Arm, qui se base sur la main Phoenix en y ajoutant une sorte de gouttière pour accueillir l’avant-bras de l’enfant, et une jointure au niveau du coude avec une manchette qui s’accroche au bras. C’est donc le mouvement du coude qui va piloter, à distance via des câbles plus longs, la préhension des doigts. Un élément important, Drew et Stephen n’ont pas seulement proposé une nouvelle configuration avec commande par le coude, ils ont aussi mis au point une procédure de mise à l’échelle basée sur 4 mesures caractéristiques de la morphologie du patient, et tout ceci est encapsulé dans un fichier OpenScad.
C’est parti…
Forts de nos premiers prototypes et des données disponibles pour le bras Unlimbited Alfie, nous appliquons la méthode de dimensionnement et imprimons les premières pièces.
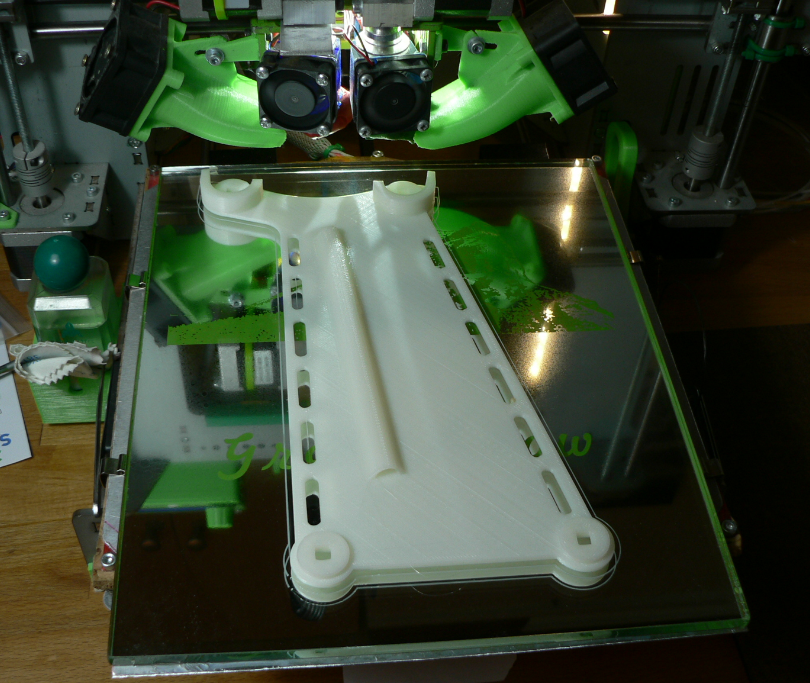
Pièces trop longues
Il apparaît rapidement que l’avant-bras sera plus long que 200mm… il faut donc modifier une de nos machines pour pouvoir l’imprimer, ou l’imprimer en 2 parties qu’il faudra ensuite assembler.
Patrick développe quelques solutions d’assemblage par des tiges composites, pendant que Philippe allonge son plateau d’imprimante. La longueur d’impression obtenue (232mm) s’avère suffisante, c’est donc cette solution qui sera retenue puisque sensiblement plus simple de mise en œuvre. Ce problème de longueur est momentanément résolu pour Mattéo, mais reste entier pour imprimer un avant)bras plus long. Nous mettons donc en chantier, une version de l’imprimante qui permettra d’avoir une longueur d’impression de 300mm suivant l’axe Y.
Intégration d’un palonnier
Les modèles historiques de e-Nable sont munis d’un boitier contenant 5 tiroirs auxquels sont accrochés les tendons, ceci pour régler séparément la position de repos de chaque doigt et pour qu’ils se ferment à peu près simultanément. Le problème de cette solution est que lorsqu’un des 4 doigts arrive au contact de l’objet que l’enfant veut prendre, le mouvement de commande est arrêté par ce tendon sous tension, les autres doigts ne peuvent plus progresser, l’objet est donc porté entre le pouce et un seul autre doigt, ce qui limite l’efficacité de la prise.
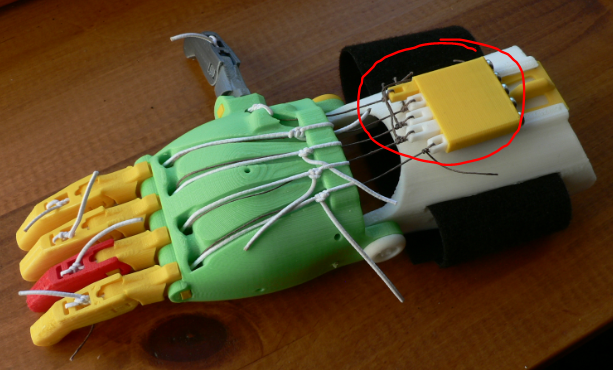
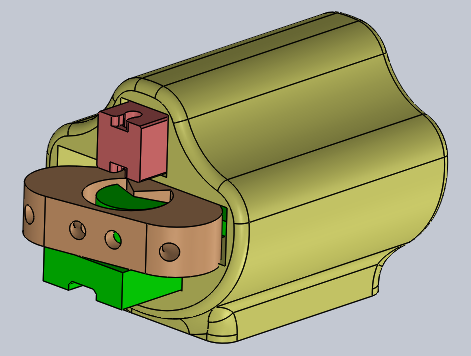
Le bras Unlimbited reproduit ce principe en fixant le boitier tendeur au niveau du biceps. Mais John Diamond a proposé pour la commande d’une main Phoenix l’introduction d’un whippletree ![]() (palonnier) qui permet aux 4 doigts de venir en contact et de répartir leurs efforts sur un objet de forme potentiellement assez complexe. Regardez la vidéo
(palonnier) qui permet aux 4 doigts de venir en contact et de répartir leurs efforts sur un objet de forme potentiellement assez complexe. Regardez la vidéo ![]() pour en comprendre le fonctionnement (et nous présenterons plus loin une vidéo démontrant le fonctionnement de notre dernière version de palonnier). Nous adaptons donc ce palonnier pour qu’il puisse être fixé sur le haut du bras Unlimbited:
pour en comprendre le fonctionnement (et nous présenterons plus loin une vidéo démontrant le fonctionnement de notre dernière version de palonnier). Nous adaptons donc ce palonnier pour qu’il puisse être fixé sur le haut du bras Unlimbited:
Friction trop importante
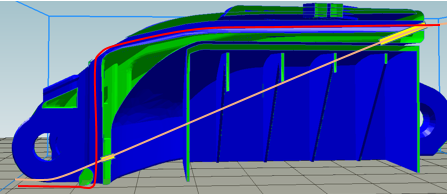
Une nouvelle difficulté apparaît : le fonctionnement du palonnier nécessite qu’un même fil (tendon) relie deux doigts voisins en passant par le palonnier. Lorsqu’un des deux doigts est bloqué par l’objet, pour que le doigt associé puisse poursuivre son mouvement le tendon doit coulisser à travers tous les chemins qui le mènent au palonnier, coulisser dans le chenal circulaire du palonnier, et coulisser encore dans le chemin retour jusqu’à la main et au doigt. La complexité du trajet effectué entre doigt et biceps, et la tension du tendon, génèrent des frottements importants, qui n’empêchent pas la main de fonctionner mais nécessitent des tensions importantes, et donc de gros efforts sur le fil, sur les nœuds, et potentiellement une usure rapide des pièces en plastique sur le trajet du tendon. Nous allons donc analyser le problème et tenter de réduire ces frottements.
Les modifications apportées sont publiées sur cette page afin que d’autres makers e-Nable puissent s’en inspirer pour leurs prochaines prothèses de bras.
Elles consistent en résumé :
- à simplifier autant que possible le trajet des tendons entre les bouts de doigts et le boîtier tendeur situé sur le biceps (limiter les virages inutiles et guider les tendons dans des tubes en Téflon),
- à déplacer le palonnier dans la paume de la main, donc au plus près des doigts afin que les tendons coulissent sans difficulté entre deux doigts associés.
Le fonctionnement du nouveau palonnier est visible sur cette vidéo. ![]()

Adhérence de la main sur les objets manipulés
Lors des tests de nos premiers prototypes, qui ont été envoyés à l’association pour que nous puissions être des « makers validés », nous avons constaté que la plupart des objets que nous tentions de manipuler avec notre main en PLA glissait entre le pouce et les doigts, et sur la paume… Voici par exemple la paume de la main imprimée selon le modèle « Team Unlimbited »:
C’est une surface ajourée, mais plane au départ, en plastique rigide et lisse. Elle est prévue pour être thermoformée, c’est à dire chauffée (avec un sèche-cheveux par exemple) et mise en forme pour faciliter l’insertion du moignon du bénéficiaire en fonction de sa morphologie. Mais une fois mis en forme, elle redevient rigide. Il était dans nos tests presque impossible de se servir de cette main pour tenir un gobelet, ou tout autre objet similaire. Nous souhaitions donc, pour la version que nous allions livrer à Mattéo, améliorer l’adhérence des doigts sur les objets manipulés.
 Pour les mains de grande taille (ados ou adultes) il est classique chez e-Nable d’utiliser des doigtiers en silicone, comme ceux-ci-contre. Mais dans le cas de Mattéo, la plus petite taille de doigtiers que Patrick a commandée est encore beaucoup trop grande. Pour la paume, d’autres modèles disposent de paumes rapportées en cuir par exemple et fixées par des vis.
Pour les mains de grande taille (ados ou adultes) il est classique chez e-Nable d’utiliser des doigtiers en silicone, comme ceux-ci-contre. Mais dans le cas de Mattéo, la plus petite taille de doigtiers que Patrick a commandée est encore beaucoup trop grande. Pour la paume, d’autres modèles disposent de paumes rapportées en cuir par exemple et fixées par des vis.
Nous avons tenté de placer des élastiques ou des joints toriques dans des rainures autour des doigts, mais l’adhérence reste trop faible, et les élastiques ne restent pas dans les rainures. Grâce à une imprimante à double buse, nous avons imprimé des doigts bi-matériaux, munis d’une zone rigide pour la transmission d’effort, et d’une épaisseur en matériau « souple » pour améliorer la surface de contact. Divers essais ont été effectués avec du FlexiFil, du FilaFlex, du FlexPLA, du NinjaFLex…  On aperçoit sur l’image suivante en transparence une zone imprimée en matériau souple.
On aperçoit sur l’image suivante en transparence une zone imprimée en matériau souple.
Mais nous souhaitions aussi proposer une solution ne nécessitant pas de double buse, car beaucoup de makers n’ont pas cette option sur leur machine. Nous avons rainuré le bout des doigts… Appliqué une sorte de peinture caoutchouc sur le bout du doigt (PlastiDip), soit sur du PLA rigide, soit sur du souple. Une dernière phalange toute en souple n’est pas assez rigide, mais la couche caoutchouc semble bien efficace sur le Ninjaflex…
La solution finalement adoptée est publiée en détails sur cette page, elle consiste en une phalange distale en 2 parties imprimées séparément et emboîtées l’une sur l’autre, une paume un peu travaillée au niveau de la forme et des matériaux (structure en plastique rigide, et surcouche de 1 à 3mm de plastique souple), et des petits coussins complémentaires sous les phalanges proximales, le tout couvert de PlasdiDip. Avec cette nouvelle main nous avons pu porter des objets relativement lourds comme par exemple un mandrin de perceuse électrique.
Ce qui a « magnétisé » Mattéo
Le petit plus technique dont nous avons pu faire la surprise à Mattéo consiste à intégrer un petit aimant néodyme (assez puissant) dans le bout de l’index. Cela lui permet de prendre des petits objets en fer juste en approchant son doigt (un trombone, une clef, un porte-clefs, un petit tournevis,…) ce qu’il ne pourrait pas faire sans cela.
Et du coup, Mattéo a vraiment une main de super héros !!!

Ce qui a « scotché » Mattéo
Le petit plus esthétique enfin, sa Maman nous ayant dit qu’il était passionné de Spiderman, c’est la toile d’araignée que nous avons pu coller sur le bras et qui fait un bel effet lorsqu’il tend sa main vers l’adversaire 🙂
Le résultat…
Le modèle final

A partir du modèle colorié décrivant les souhaits de l’enfant (image ci-dessus), le bras final a pu être livré à la date initialement prévue (soit environ 2 mois après la prise de contacts avec la famille de Mattéo). Les finitions ont été faites en présence de Mattéo, vérification de longueur et rivetage des sangles en cuir, mise en place du tissus-mousse absorbant amovible, et mise en place de la toile d’araignée de Spiderman !!
La livraison
Ce fut une belle journée, pleine d’émotions. après avoir ouvert son « paquet cadeau », et une fois les derniers réglages effectués, avec son bras et sa nouvelle main droite, Mattéo nous a montré qu’il pouvait porter un gros paquet de bonbons, faire des combats de sabre avec toute la famille, prendre un anneau de porte-clefs posé sur la table, porter un bocal de Nutella, et même apporter un magnifique bouquet de fleurs le jour de l’anniversaire de sa Maman !!!



Les jours suivants…
Après… un peu de médiatisation pour susciter d’autres actions similaires… par exemple Mattéo fait la Une du journal local, puis peu de temps après, un passage au 19-20 en premier sujet de France3 Auvergne (visible quelques jours en replay) !
Mais surtout de notre part, à toute la famille de Mattéo…
On vous souhaite, tout le bonheur du monde,
Et que quelqu’un vous tende la main…
et à toi Mattéo, on te souhaite de poursuivre ta vie dans la simplicité et avec la lucidité dont tu as fait preuve en notre présence 🙂
Philippe & Patrick.


Good job guys !