Avant Propos
Avec beaucoup de retard, nous publions le résultat d’une étude réalisée au cours de l’année universitaire 2021. Ce document de synthèse a servi de support à la soutenance du projet diplômant, de 5 étudiants ingénieurs à L’INP de Grenoble.
La team Gre-Nable propose des sujets d’étude et apporte son soutien aux étudiants et peut disposer des résultats de ces projets pour les publier sous licence open-source et pour construire des solutions pour des handicapés.
Cahier des Charges
Contactée par un neurologue, la team s’est intéressée à rechercher un début de solution pour que les personnes atteintes de tremblements importants ou de maladie de Parkinson, puissent se nourrir de façon autonome.
Conscient que des solutions commerciales existent, elles ne sont peut être pas disponibles pour tout le monde. Rappelons que les membres de team Gre-Nable sont des makers qualifiés par l’association e-nable france, elle-même membre de la communauté internationales Enablingthefuture.org.
Spécifications
- concevoir une cuiller asservie devant contrer/amortir les mouvements de tremblement du porteur,
- utiliser des composants sourçables facilement,
- alimenter par batteries,
- pas de contraintes de taille, seules les fonctionnalités seront appréciées.
Projet
L’équipe des 5 élèves s’est donc réparti les tâches d’étude, de réalisation et de gestion de projet comme si le projet était une demande d’un client pour une production et livraison.
Le pdf, ci-dessous, est le support de présentation lors de la soutenance, l’étude complète est disponible sur demande via le formulaire de contact.
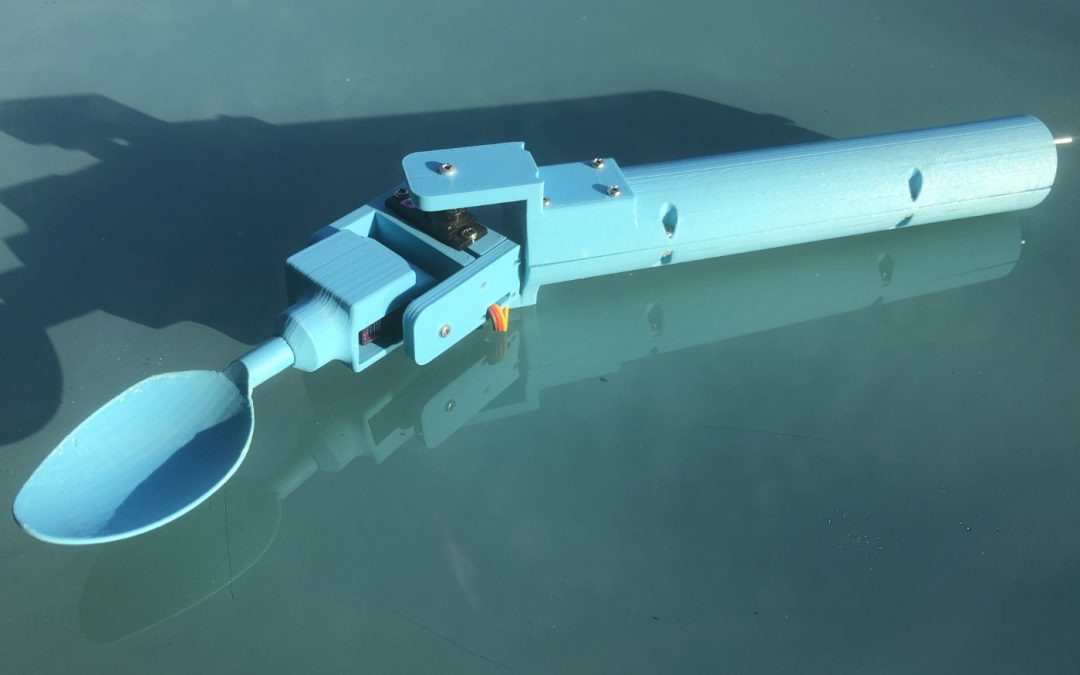
Prototype #3, le plus abouti.


Vidéos du proto #1
Conclusion
Le projet apprécié par le jury, est un « proof of concept » qu’il conviendra d’améliorer pour offrir une solution utilisable par tout à chacun.
Les voies d’amélioration sont à développer à la fois sur le plan mécanique et sur le plan électronique embarquée.
Poins d’amélioration:
- pour diminuer les effets des tremblements, il faut améliorer le temps de réponse du process. Aujourd’hui, la boucle d’asservissement est trop longue,
- les servos utilisés sont trop gros, ce qui résulte en une mécanique imposante,
- les batteries sont également à miniaturiser.
Commentaires récents