
Nouvelle Evolution du Bâton de Ski
Avant-propos
Nouvelle évolution de notre bâton de ski pour enfant agénésique, cette version reprend nos anciens concepts en les améliorant. Lorsque Mahée aura bien testé et validé cette version, nous standardiserons le concept pour offrir aux autres makers une solution facilement adaptable à chaque agénésie.
Pour le cas présent de Mahée, jeune fille d’une dizaine d’années habitant dans la banlieue de Bruxelles, nous devons appareiller son petit bras avec un emboitement précis à réaliser pour que le bâton de ski soit bien maintenu en position. Le moulage s’imposant, nous avons délégué la prise d’empreinte et la réalisation du contre-moule en plâtre à son père qui a réalisé un super travail. Bravo.
Moulage et contre-moule
Mahée ayant déjà un emboitement qui lui convient, réalisé par un prothésiste local, nous optons pour sa conservation et donc, notre emboitement se fixera sur la prothèse existante. Piloté par une procédure de moulage que nous avons envoyée, le papa a moulé le bras équipé de l’emboitement « belge » avec de l’alginate. Une fois la prise d’empreinte réalisée, il a suffit de couler du plâtre synthétique (choix préféré au plâtre standard) et de nous envoyer l’épreuve.
Une fois le plâtre reçu, nous l’avons scanné pour obtenir un modèle numérique de type mesh (format STL). Une difficulté apparait : nous ne connaissons ni la position exacte du contre-moule par rapport au bras de Mahée, ni la position du bras en situation de tenir un bâton de ski planté dans la neige !
La solution est vite trouvée, imprimer un emboitement de test avec un pseudo bâton de neige dont la position relative sera ajustable en longueur de bras et angle bras-bâton. Le papa sera de nouveau impliqué pour définir les paramètres qui nous manquent.
Emboitement de test pour mesure

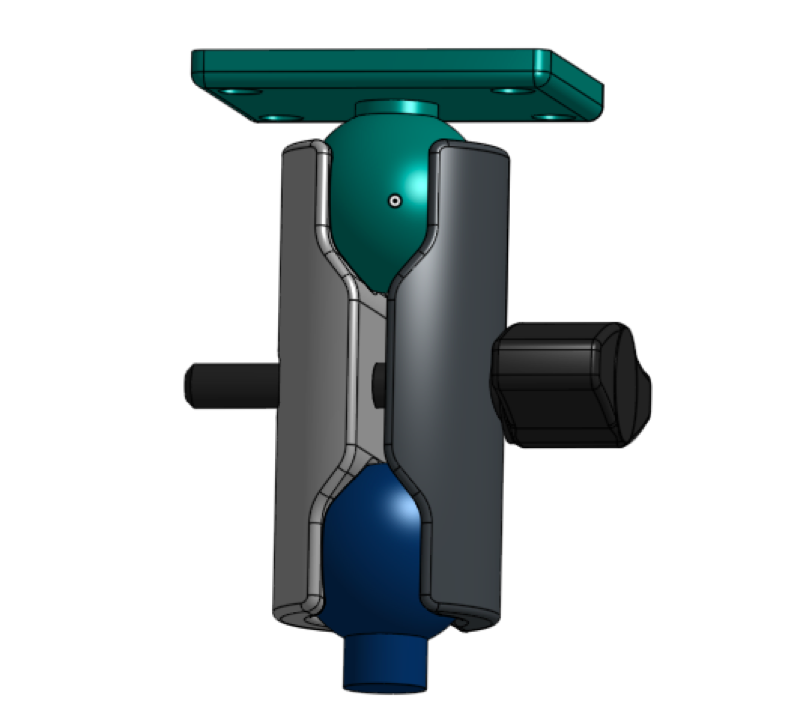
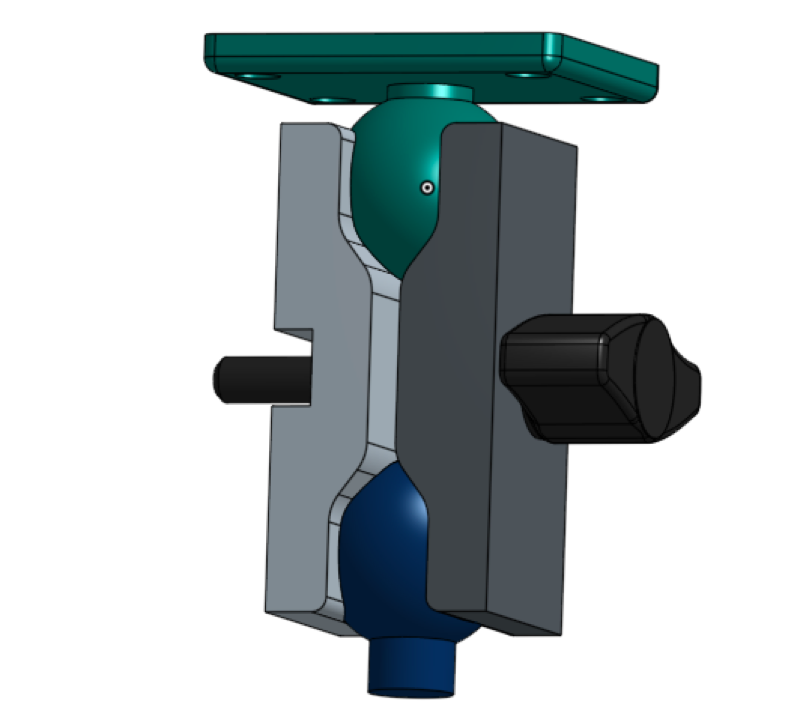
Emboitement pour mesure
Emboitement imprimé spécifi-quement pour prendre les mesures qui permettront de positionner correctement le bâton de ski par rapport au bras de Mahée.
Un tube d’électricien en PVC est greffé sur l’emboitement avec un Té qui coulisse et tourne sur le tube principal (A).
Sur la partie verticale, un tube B que le papa trouvera en grande surface de bricolage, simulera le bâton de ski.

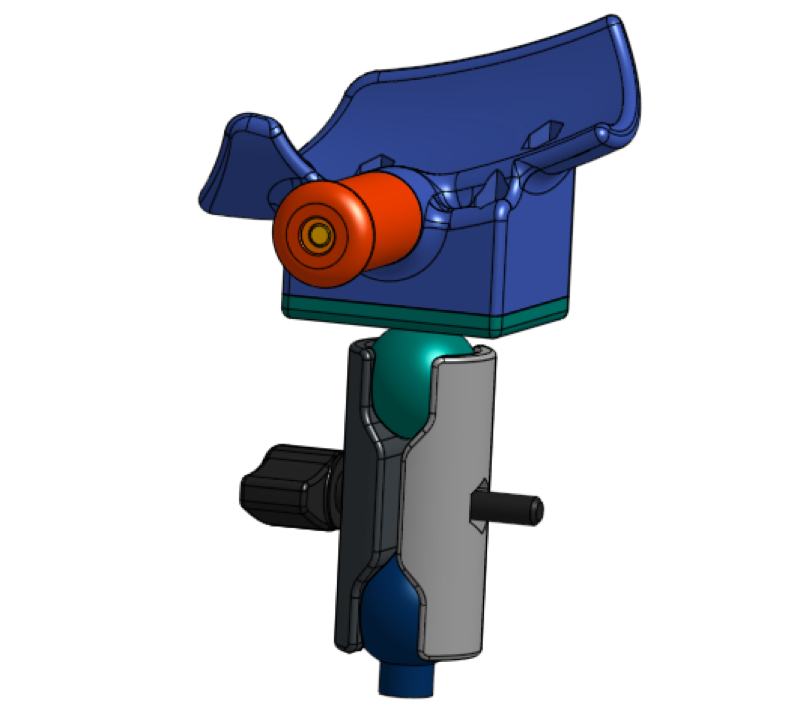
Instructions pour les mesures
Des instructions sont données pour que l’emboitement soit correctement placé sur le bras de Mahée, telle qu’elle sera quand Mahée l’utilisera sur ses skis.
En déplaçant le Té en translation, on obtiendra la position théorique du bâton en symétrie de celui dans la main droite. Cette position est fixée par la molette supérieure.
Ensuite on place le pseudo bâton de ski (tube B) à la verticale (fictivement planté dans la neige). Il en résultera un angle qui sera maintenu fixe grâce à la deuxième molette sur le support en Té.

Mesure de l’angle
Sur du papier millimétré, on dépose l’emboitement et le support réglable, la découverte de l’angle est faite à l’œil en faisant correspondre un côté du support avec des rayons préalablement tracés sur le papier millimétré.
La mesure est de 15 degrés que nous reporterons dans le sketch de la CAO, ainsi nous pouvons concevoir tout le système sans se soucier de la position relative du bâton par rapport au bras de Mahée.

Conception de l’emboitement
Ce n’est pas vraiment de la routine, mais le procédé de création de l’emboitement est désormais bien rodé par l’équipe. Le contre-moule en plâtre est scanné pour obtenir une représentation de type mesh (maillage de triangles) pour obtenir un fichier STL. La team remercie la collaboration de laCasemate qui nous héberge et met à disposition les outils que nous n’avons pas).
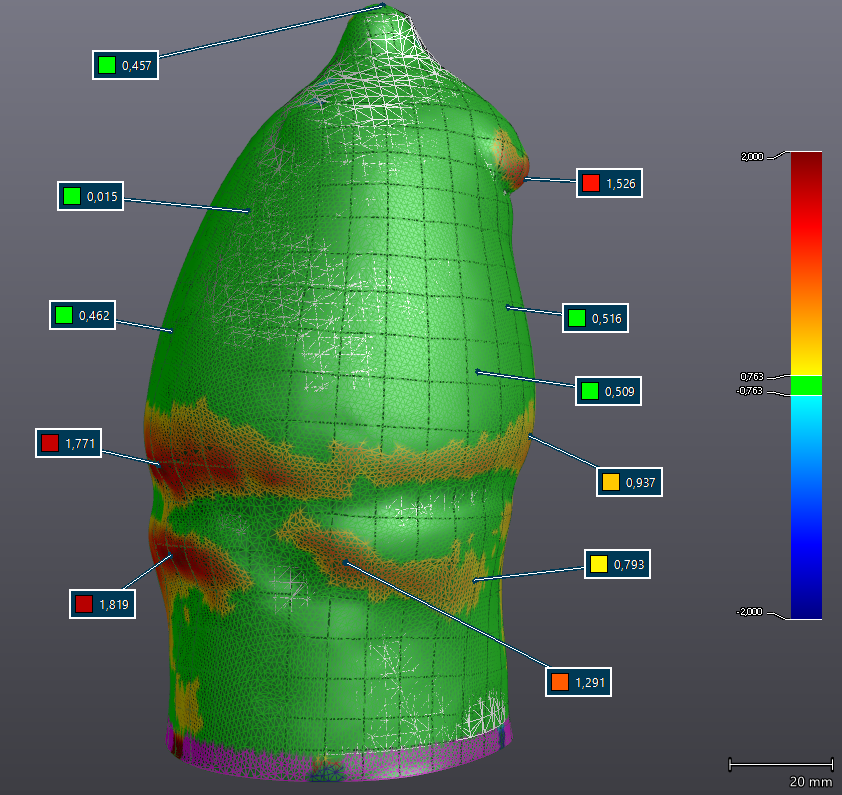
Importation du mesh dans la page du projet sous Onshape
Ensuite le STL est importé dans notre logiciel de CAO favori : Onshape. Le contre-moule est affiché avec des millions de triangles, et va être découpé par des plans parallèles pour nous permettre de dessiner des sections à chaque intersection STL-plan de coupe.

Dessin des sections
Sur chaque plan, en se « collant » sur l’extérieur du mesh, on dessine la section du bras en utilisant des primitives de type « spline ». K’expérience nous à appris qu’il faut créer exactement le même nombre de segments (donc de vertex) pour chaque section.

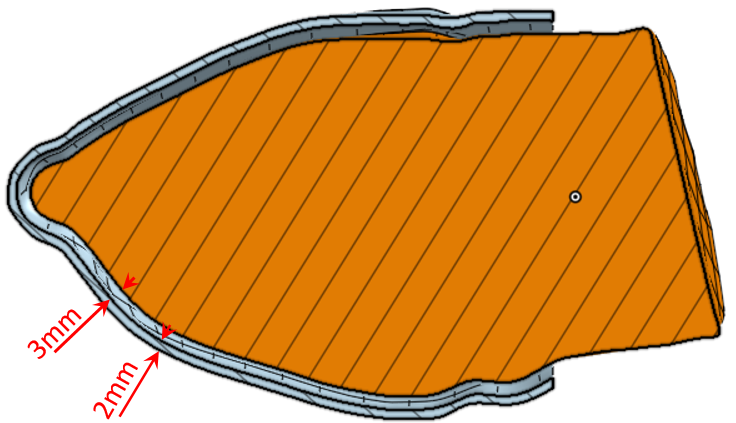
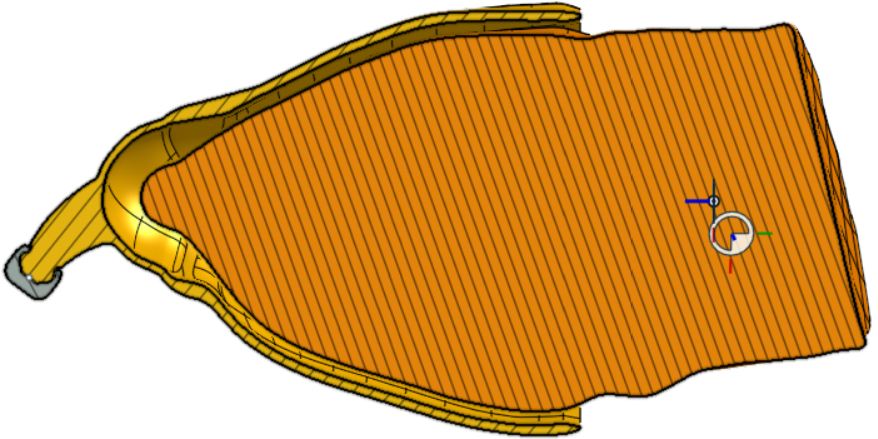
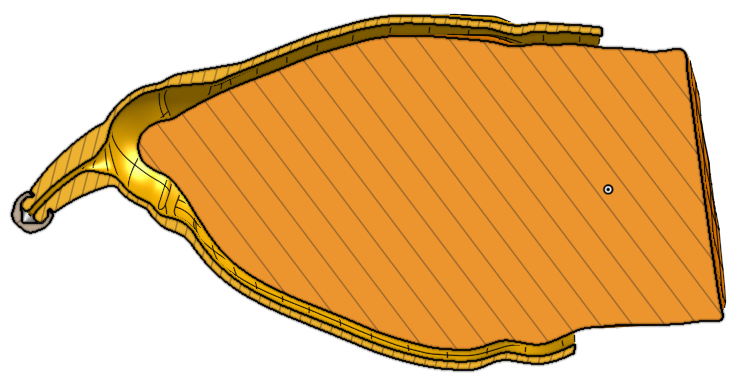
Transformation en emboitement
Le résultat du loft est une représentation volumique « idéalisée » du contre-moule. Une épaisseur va être attribuée à la surface du loft qui est égale à une variable d’ajustement « épaisseur du gant » (3 mm) additionnée d’une autre variable d’épaisseur de l’emboitement. Après essais avec Mahée, il sera très facile d’augmenter le jeu entre son bras et l’emboitement ou l’épaisseur de l’emboitement en plastique seulement en modifiant ces paramètres (c’est la « magie » des outils de CAO Paramétrable).

Découpage
A partir d’un plan de référence, 7 plans parallèles sont créés à intervalles réguliers.

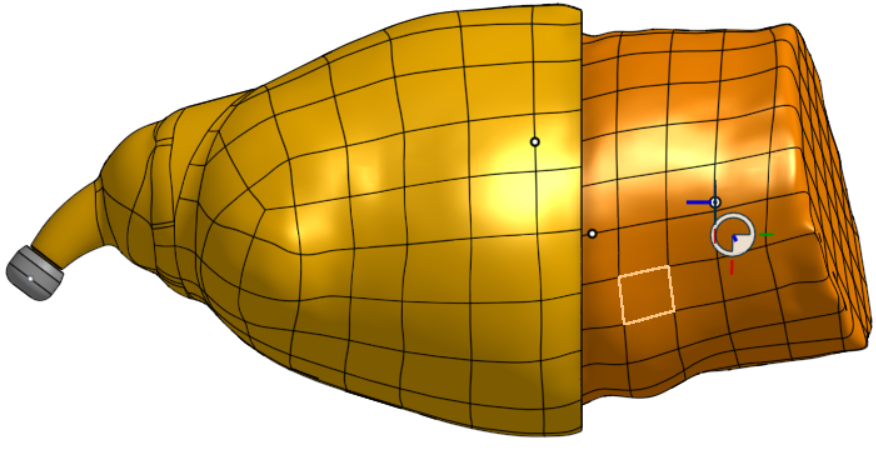
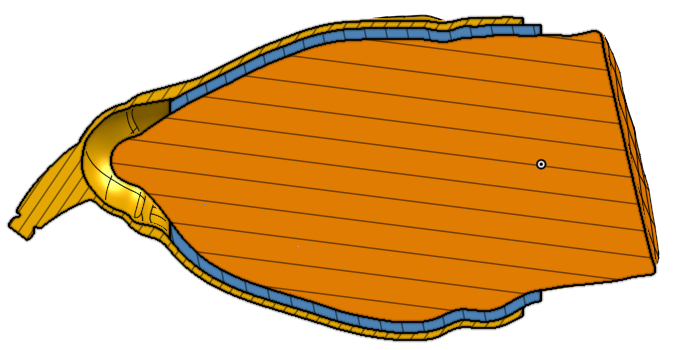
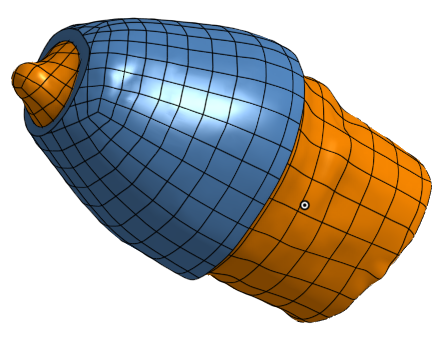
Création de l’enveloppe
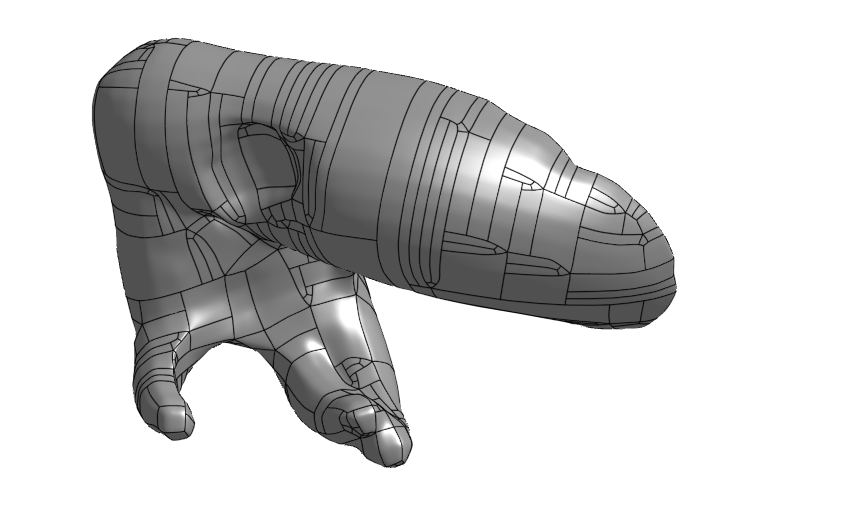
Les 7 sections étant dessinées, en utilisation de la directive « loft » on construit une enveloppe réunissant « au mieux » chaque section à la suivante. Des paramètres de construction sont définies pour figer les règles de construction du loft.
Les résultat du loft est une surface fermée, donc un volume qu’il faudra creuser.

Encore un nouveau concept
Le bâton réalisé pour Manon a donné d’excellents résultats en termes de maintien du bâton et de sécurité en cas de chute. Mais l’agénésie de l’avant-bras de Mahée ne facilite pas l’intégration de la structure « Manon » à la physiologie du bras de Mahée. Donc il était nécessaire de concevoir une autre architecture tout en conservant le principe de la liaison aimantée.
Quelques prototypes plus tard, nous avons trouvé une solution qui va devenir notre concept de base pour toutes les nouvelles demandes. En effet cette structure peut s’adapter à tout type d’agénésie (totale de la main ou partielle). L’aimant sera positionné à l’horizontal sur le bâton et la contre-plaque fera partie de l’emboitement.
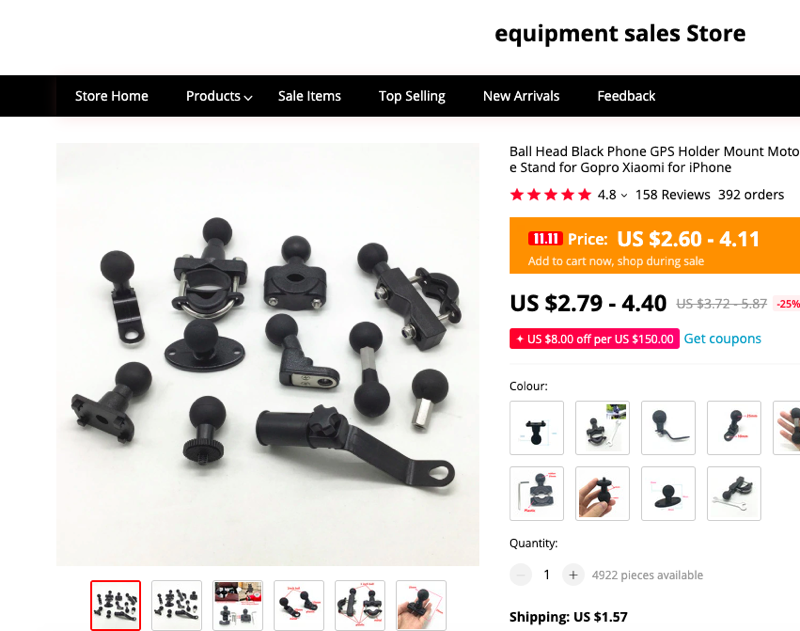
Restait à trouver l’aimant qui aurait la force d’unir le bâton à l’emboitement et également la capacité à se « déboiter » en cas de chute. Forts des échanges avec les autres membres du LOGre, nous nous sommes intéressés aux aimants à Effet « Halbard« qui génère un flux magnétique plus fort qu’avec un aimant néodyne standard, à volume et masse équivalents. Sur une idée de l’un d’entre nous, une suggestion de récupérer les aimants utilisés dans les moteurs linéaires des disques durs !! Donc, en vrai hackers, nous avons démonté plusieurs disques durs pour en choisir un aimant qui convenait au besoin.

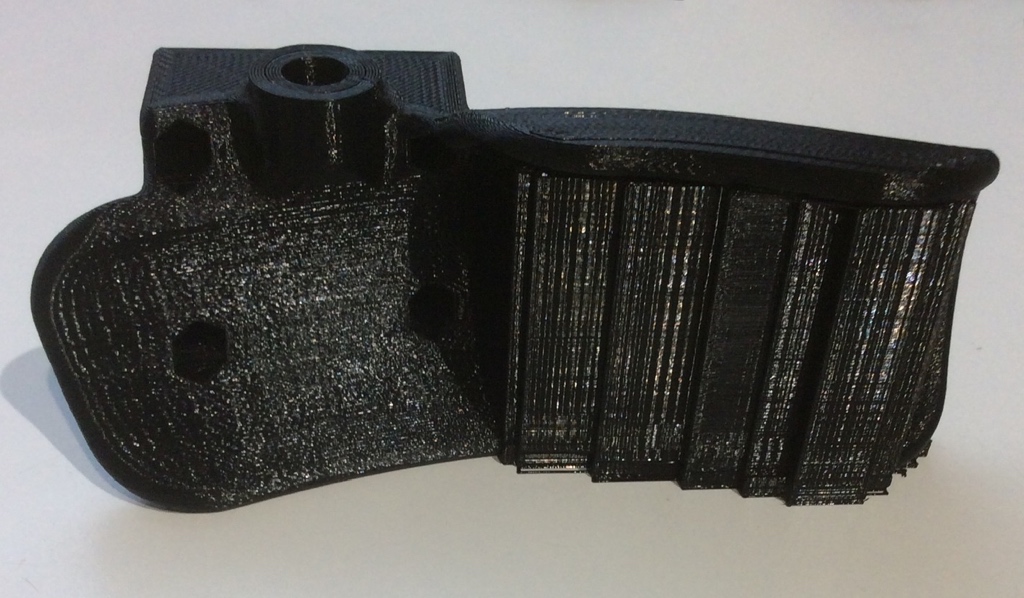
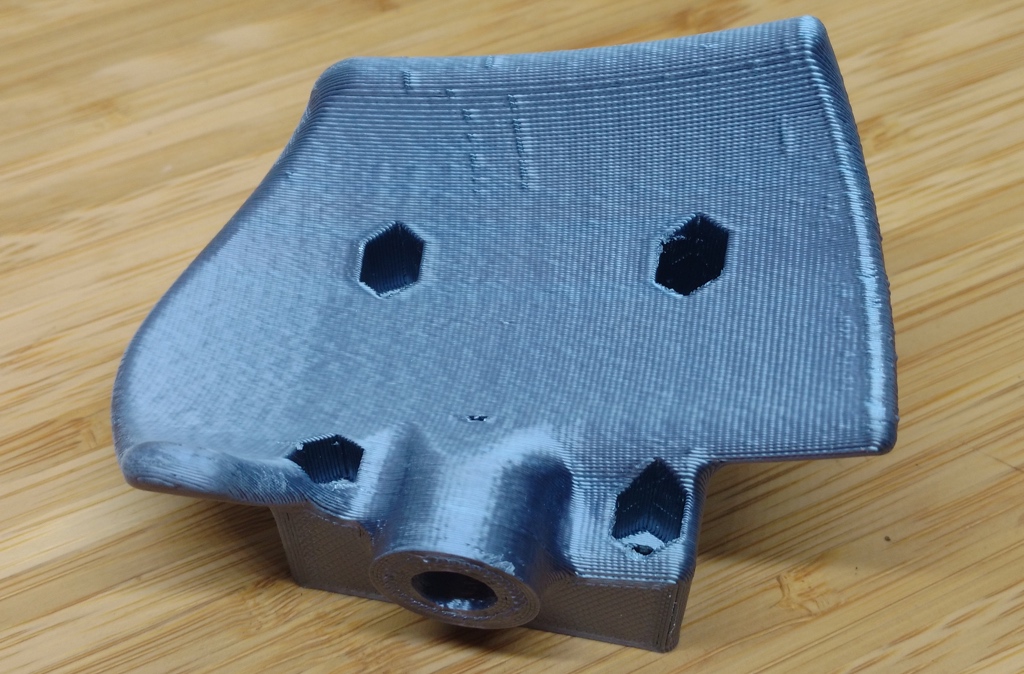
Dispositif sur bâton
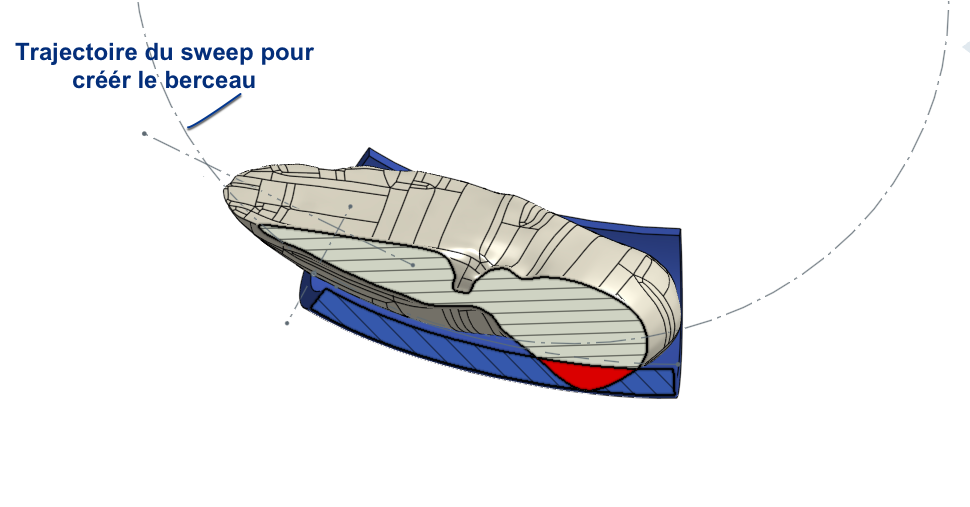
Les dimensions de l’aimant s’inscrivent dans un support circulaire de diamètre 60mm. Le bâton ayant un diamètre de 16 mm, le dispositif aura une forme tronconique, avec une excroissance sur le côté pour le logement de la dragonne.
Pour absorber les chocs et avoir un ajustement serré, un tube de coincement en plastique souple (Filaflex) sera inséré entre le dispositif et le bâton.




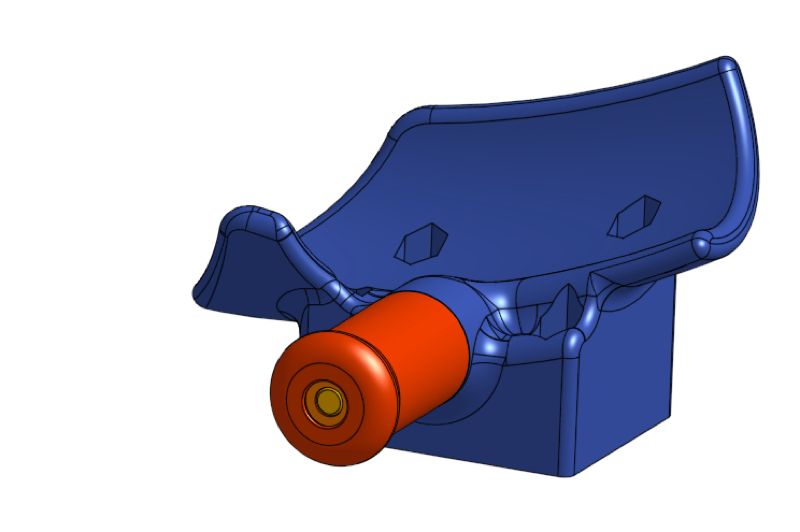
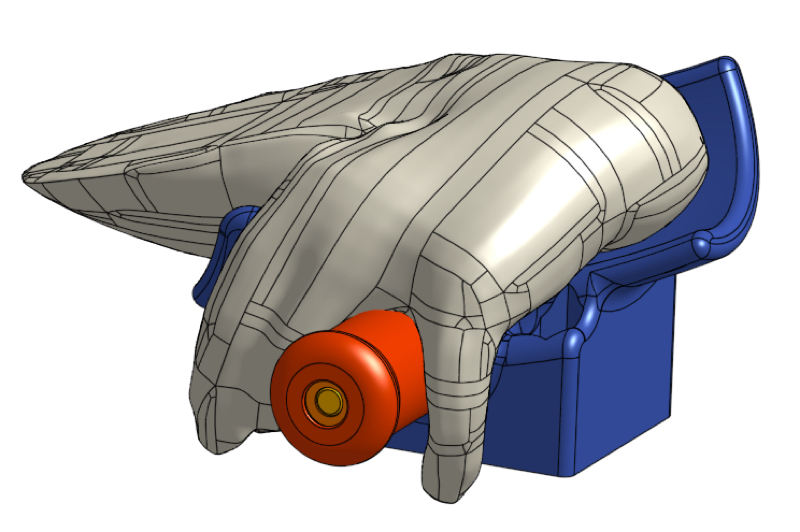
Poignée
Parce que le système complet est difficile à mettre au point et à imprimer, la poignée sera indépendante et fixée ultérieurement sur l’emboîtement.Cela permettra également de faire évoluer la taille de l’emboîtement lorsque Mahée grandira.
L’aimant étant solidaire du bâton, la poignée intégrera la contre-plaque. N’ayant pas de retour d’expérience sur les efforts exercés sur le bras de Mahée, et donc la solidité requise pour la poignée, nous choisissons de placer un tube en carbone à l’intérieur de la poignée (comme un longeron d’aile). C’est une solution certainement « overkill » pour le besoin présent, mais comme le dispositif est léger, ce n’est pas un problème.
Résultat final : version Mahée !

… et le froid ?
Bonne question. Le bras de Mahée dans l’emboîtement n’est pas protégé du froid avec la poignée « collée » au bâton via l’aimant.
Imitant le concept des sur-gants des parapentistes, les parents de Mahée ont découpé la partie inférieure d’une moufle et ont comblé le trou en cousant un tissu étanche extrêmement fin qui deviendra l’entrefer entre la contre-plaque et l’aimant. Lorsque Mahée est sur la piste, le bâton Gre-nable passe complètement inaperçu 🙂

Détail du bras

Premiers pas

Skis parallèles !

Stem

Equipe Belge au JO 2030 ?








 L’arthrogrypose défini par ChatGPT :
L’arthrogrypose défini par ChatGPT :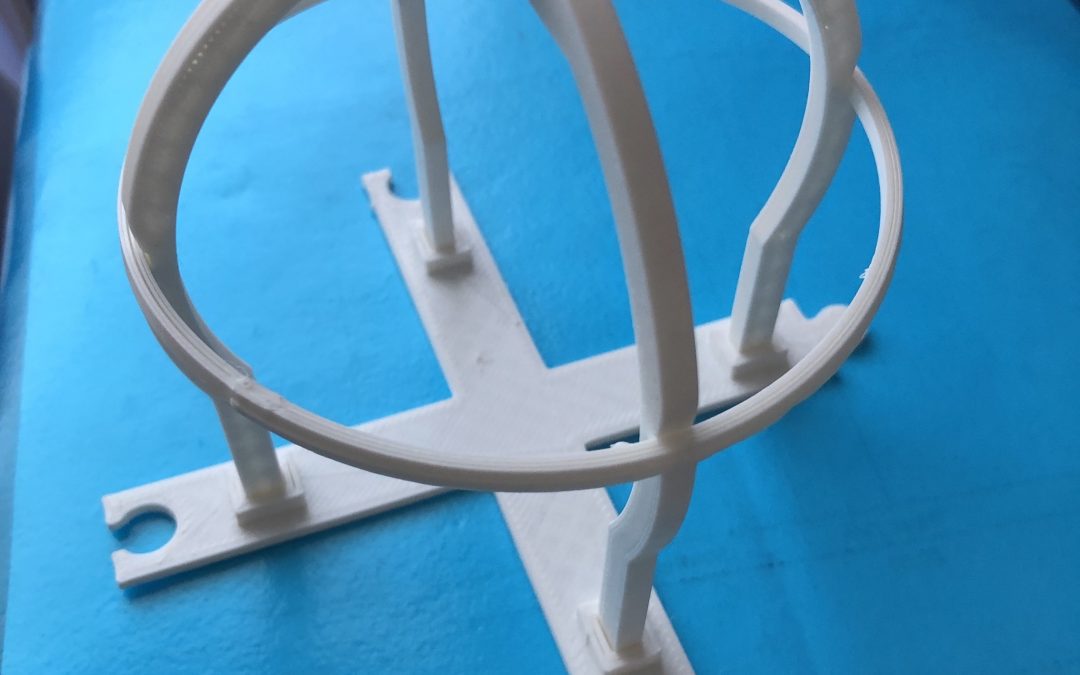











































Commentaires récents