COV-ISere est le modèle de visière à picots à grande couverture de visage, approuvé par le CLIN* du CHUGA**.
La Visière « COV-ISere », est développée par un Collectif pour les Visières contre les Postillons de personnes susceptibles d’avoir été contaminées par le COVid en Isère.
* CLIN : Comité de Lutte contre les Infections Nosocomiales, ** CHU Grenoble-Alpes
Ce modèle conçu et produit par un Collectif de makers grenoblois « COV-ISere » (des personnels de Grenoble-INP, du pôle S.mart Grenoble-Alpes, des membres du Laboratoire Ouvert de Grenoble, ainsi que les membres de la Team Gre-Nable) en collaboration étroite avec Manuel François, kinésithérapeute au CHU de Grenoble, permet aux soignants de conserver leur masque FFP2 sous la visière, tout en augmentant leur protection vis à vis des postillons d’un patient en phase d’intubation. Après plusieurs itérations prenant en compte les retours d’expérience des équipes de soignants, la visière COV-ISere synthétise les solutions techniques de protection les plus performantes contre les postillons en complément du port de masque FFP2.
Cette visière n’est pas un équipement médical de protection, mais une aide supplémentaire contre les postillons. Les personnes qui portent cette visière, sont parfaitement informées que la seule protection officielle et agréée, est celle prescrite et fournie par leur service et leur encadrement.
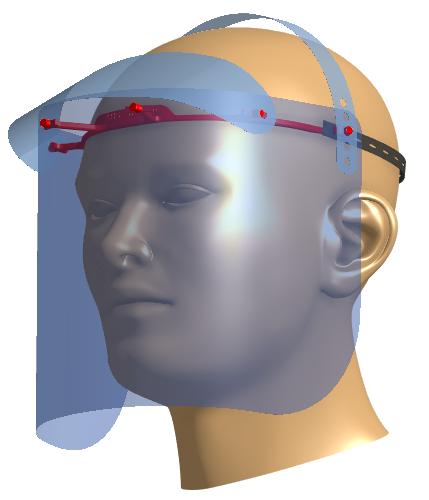
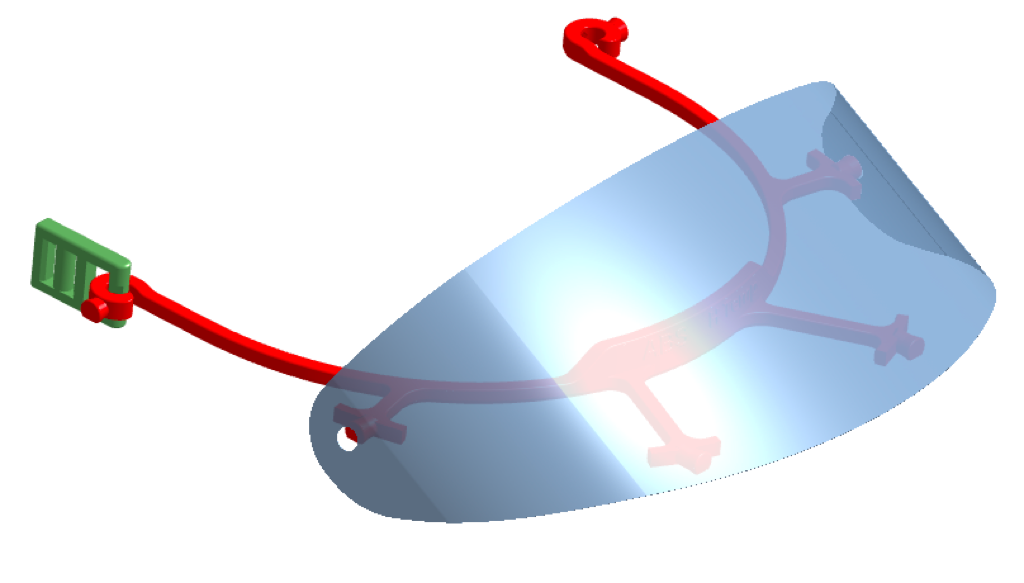
Ce nouveau design permet d’agrafer un film rhodoïd, PVC ou en PET*** au format A3 (en disposition paysage) qui protège la tête du soignant d’une oreille à l’autre.
- temps d’impression : de 40 à 45minutes
- hauteur de couches : 3/10eme
- vitesse d’impression : 60 mm/s
*** Remercions au passage la société AMCOR qui nous avait fourni gracieusement du tissus « SMS » (en fait, un non-tissé, filtrant à plus de 99% mais laissant passer l’air, utilisé en milieu hospitalier pour emballer les matériels stériles) pour la fabrication de masques tissus. AMCOR nous a fourni également un énorme rouleau de PET d’excellente qualité (plus transparent et sans reflets comparé aux autres matériaux que nous utilisions) pour la fabrication d’écrans de visières de protection. SMS et PET ont été utilisés par notre collectif COV-Isère, le LOG, ainsi que divers fablabs et acteurs associatifs du bassin grenoblois.

Version courante : COV-ISere_v7c
Pour imprimer le support de visière, quatre fichiers STL sont proposés, à choisir en fonction de la matière utilisée pour l’impression. Ils sont géométriquement identiques, seule l’indication du matériau utilisé pour l’impression change afin d’indiquer aux personnels chargés de l’aseptisation, s’ils peuvent tremper le support dans un mélange chaud ou froid (B Temp pour lavage à l’eau froide, H Temp pour haute température).
- STL de la visière version dite « Basse Température » en PLA
- TL visière version « PETG – Basse Température » en PETG
- STL visière version « ABS – Haute Température » en ABS pour aseptisation en autoclave
- STL visière version « HIPS – Haute Température » en HIPS pour aseptisation en autoclave
Ce nouveau design nécessite 6 trous, espacés de 80mm dans une plaque de Rhodoïd, PVC ou PET de format A3. Le patron de perçage est disponible dans le bundle zippé aux formats PDF et DXF, à imprimer avec le paramètre d’impression : échelle à 100% et mode paysage.
Tous les fichiers sont rassemblés dans un bundle (V7c) – dernière mise à jour 16 Mai –
Bundle zippé de tous les fichiers (2,8 Mo)




























Commentaires récents