
L’art de manipuler une feuille de papier
Emma
Fillette de 4 ans, Emma souffre d’une agénésie de la main droite.
Sa maman s’est tournée vers E-Nable pour répondre à deux problématiques qu’Emma vit au quotidien à l’école :
- Déboucher et reboucher des feutres: sans prise efficace du bouchon, il est difficile de manipuler les feutres.
- Maintenir une feuille de papier pour réaliser du découpage.
Un nouveau défi pour l’équipe Gre-Nable, qui n’a pas encore de solution sur étagère à proposer.
Emma a également émit un dernier souhait, hautement important : la main devra être rose et bleue. Contrainte difficile à tenir, mais nous ferons tout notre possible pour y parvenir !
Pourquoi la main classique ne répond pas au besoin
La traditionnelle main de E-Nable ne correspond pas au besoin d’Emma. Elle a besoin d’un serrage très fort pour pincer une feuille, et réglable pour s’adapter à tout diamètre de feutre.
Une solution sur-mesure est donc nécessaire.
La première étape consistera donc, classiquement, au moulage du bras.
Moulage et scan du bras
La soirée moulage aura permis à Emma et sa maman de rencontrer les membres de l’équipe. Nous avons aussi profité de cette rencontre pour mieux appréhender la solution, en fonction des mouvements que peut réaliser la petite.
Deux techniques sont utilisées ici.
1- Le scan 3D appliqué directement sur le bras d’Emma
La difficulté de cette méthode réside dans le fait que le sujet doit rester parfaitement immobile, au risque de fausser les volumes scannés. Avec des petites retouches Blender, le scan est parfaitement utilisable !
Emma s’est prise au jeu avec brio et n’a pas bougé d’un poil. Les résultats sont impeccables !

2- Le traditionnel moulage au plâtre
Que l’on a scanné par la suite sous toutes coutures.
En plus, l’activité est plutôt amusante 🙂

Une fois le moule réalisé, nous avons pu le scanner lui aussi.

Une fois les scans réalisés, la balle est dans notre camp ! A nous de jouer !
Les prototypes
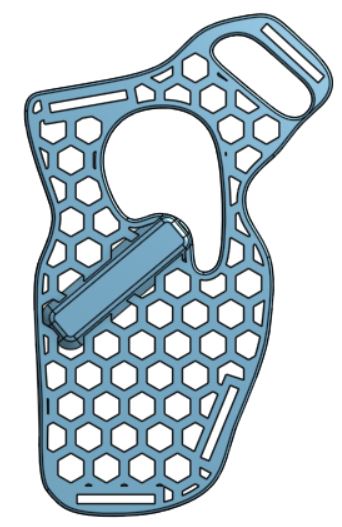
Premier prototype : système à bille
Le premier prototype réalisé propose une solution à base d’une bille.
L’idée étant de permettre à une enfant d’exercer une grosse pression avec un très petit mouvement de base.
En pratique, le système n’est pas franchement concluant: la bille en métal use trop rapidement le PLA de l’impression.
Les tolérances sont également trop larges avec ce matériau, et le mouvement n’est tout simplement pas fluide.
")

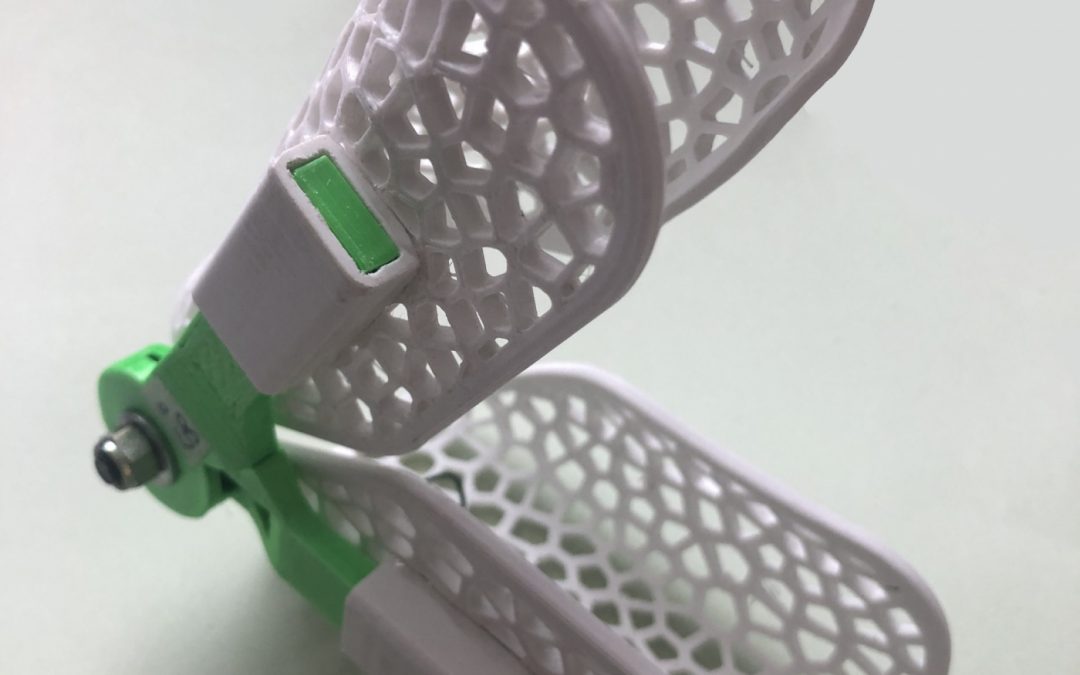
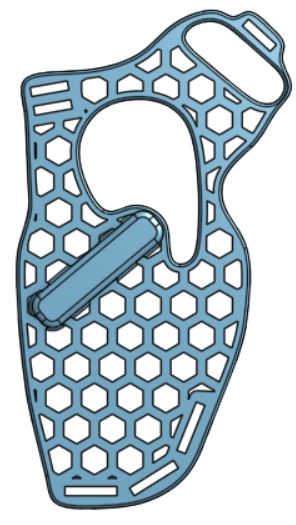
Solution validée : système à pince excentrique
La deuxième solution revient à une mécanique plus simple.
L’idée est inspirée d’un classique serrage de selle de vélo: un petit mouvement de levier qui produit un couple de serrage énorme.
En quelques prototypes, le concept est validé.
Les itérations suivantes servent principalement à optimiser la force de serrage.

Le couple de serrage est excellent et facile.
Un ressort permet de conserver la pince en position ouverte.

L’axe étant fileté, il suffit de visser/dévisser la poignée pour choisir son ouverture maximale.




Manchon du bras
Une nouveauté de Gre-nable : l’emboiture amovible pour la fixation au bras.
Séparer la pince et le manchon apporte de nombreux avantages:
- Plus facile à maintenir: pas besoin de tout réimprimer pour faire évoluer les designs
- Plus évolutif: un seul manchon peut se fixer à de multiples embouts.
- Plus durable: lorsqu’Emma aura grandi, il suffira d’adapter le manchon, la pince reste fonctionnelle.
La fixation est réalisée par un système de fermeture « quick-lock » :

Côté pince,

Côté manche,

et le résultat final !

Resultat des essais
Après les premiers essais d’Emma, nous faisons deux constats:
D’abord, Emma est capable de pincer une feuille. C’est une super nouvelle.
En revanche, elle ne trouve pas d’intérêt à utiliser la pince pour boucher ou déboucher un feutre. Emma est tout simplement plus habile avec son coude.
On peut donc valider le concept et imprimer la pince dans la couleur définitive !

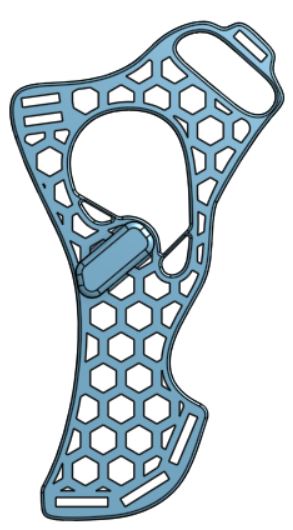
Bonus : la pince… à linge !
Si on se concentre uniquement sur la fonction « Pincer une feuille », on peut alors éliminer l’ouverture permettant de coincer le bouchon sur le bout de la pince. Mieux encore, il n’est plus nécessaire de conserver le système de réglage de l’ouverture en vissant/dévissant la molette de serrage.
Un nouveau modèle voit donc le jour, sur le principe de la pince à linge. Mécaniquement plus simple, moins de pièces, plus facile à imprimer, voici le résultat:



Pour conclure
Emma dispose donc de deux pinces, qu’elle peut emboîter dans le même manchon facilement. Elle a donc tout loisir de choisir sa préférée pour s’adonner à ses travaux pratiques !















































Commentaires récents