Expression du besoin:
Par essence, la tenue d’un objet dans une main e-nable (Raptor ou Phoenix) est assurée par la position abaissée du carpe du porteur de prothèse. Nous avions identifié que cette pression vers le bas, nécessaire pour maintenir la main en tension pouvait être fatigante au bout d’un certain temps.
Lors du retour d’expérience après la livraison de notre main pour Nathalie (voir le post), il était évident qu’il fallait trouver une solution pour soulager les muscles de la main appareillée.
Nathalie est une adulte ayant subi une amputation de sa main droite (au-dessus de son poignet) suite à la contraction d’une maladie nosocomiale. Après avoir contacté E-nable, elle a été équipée par une première prothèse à sa mesure. Cependant, l’utilisation récurrente et prolongée de sa prothèse – pour tenir des couverts, son sac à main, ou faire du vélo – génère une fatigue musculaire importante.
Le besoin / la démarche :
Il est donc nécessaire que la prothèse puisse garder la main verrouillée sans que cela n’entraine la contraction prolongée du poignet. En outre, cela ne doit pas l’encombrer davantage ou ajouter du poids et rester facile d’utilisation.
Différentes solutions furent envisagées pour maintenir les câbles de tension des doigts bloqués en traction sans réellement être convaincantes. La problématique fut inversée en cherchant comment la main pouvait être en position abaissée (et stable) sans besoin de maintenir l’effort de flexion du poignet. C’est ainsi qu’un schéma de principe a été validé, suivi d’un « proof of concept » (POC) réalisé hors du contexte paume-gauntlet.

Idée de base pour le maintien d’un main en tension, avec une roue dentée et un cliquet.
Pour valider l’idée, un proof of concept a été rapidement conçu en CAO et imprimée dans le week-end. La paume et le gauntlet sont simulés par les sous ensembles imprimés en bleu.

Proof of concept, tout en impression avec du PLA
Toute la CAO est réalisée avec l’application en ligne « OnShape » pour les nombreux avantages énumérés ici.
Design : Première version
Le POC ayant démontré la validé du concept, par itérations successives, nous nous sommes donc inspirés du système de roue à rochets pour arriver à cette première version :
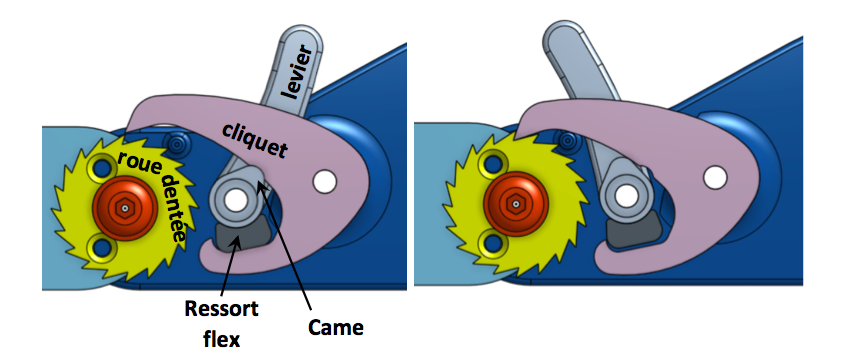
Première version du « Wrist lock». A gauche en position ouverte. A droite en position fermée
Design
Côté cinématique : la came du levier, comme dans la version finale, permet de relever le cliquet vers la position ouverte quand le levier est basculé à droite. La came se positionne alors dans un indent dessiné sur le cliquet. Le ressort flex, imprimé en filament Ninjaflex, est comprimé, pour verrouiller la position ouverte. Quand le levier est basculé à gauche, le ressort se détend et abaisse le cliquet. Il maintient également le contact entre le cliquet et la roue dentée lors de la rotation du poignet, en se comprimant et se relâchant alternativement.
Côté matériau, nous avons commencé par des tentatives d’impression des roues dentées et cliquets en PLA et iGlidur (IGUS), puis finalement les risques d’usure nous ont amené à considérer d’utiliser des pièces en métal (Alu/Acier) pour supporter les efforts générés par un adulte (typiquement, les vis auto-perforantes utilisées pour fixer la roue dentée dans la paume ont rapidement pris du jeu et ont été remplacées par deux vis-écrous). Elles se déforment trop quand elles sont imprimées avec du filament classique (PLA, ABS, PETG). De plus, les dents de la roue dentée et la pointe du cliquet présentent une usure rapide sous l’action des efforts à chaque passage de dent. La roue dentée a été achetée chez un spécialiste et le cliquet a été usiné en interne avec une CNC DIY d’un camarade de notre hackerspace. Néanmoins, les efforts étant sensiblement réduits par les modifications présentées plus loin, un « wrist lock system » complètement imprimé en 3D serait peut-être envisageable pour un enfant.
Observations après impression et assemblage
Après assemblage, le système tel qu’imaginé fonctionne sans encombre. Cependant, nous avons pu observer que le ressort flex commençait à se plastifier (rester déformé après avoir été comprimé), surtout à cause de la position ouverte, qui le comprime de façon prolongée. De même, la came, en plastique, s’use rapidement au passage de l’indent, en métal.
Il faut alors repenser ces deux éléments pour fabriquer un système pérenne. L’objectif est d’éviter l’usure de la came et la perte d’élasticité du ressort.
Seconde version
Pour la seconde version, l’introduction d’un ressort de torsion permet de résoudre les deux inconvénients observés dans la première version :
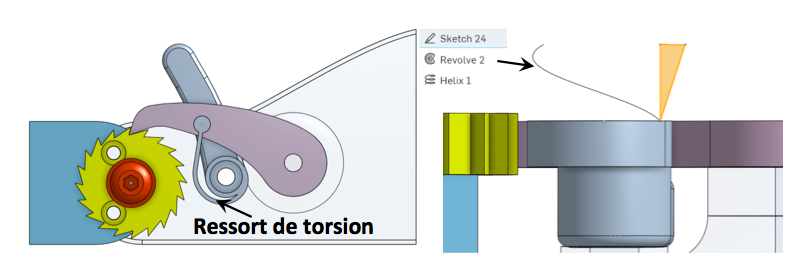
Seconde version du « Wrist lock system ». A gauche, la came et le ressort flex sont remplacées par un ressort de torsion. Ce ressort relie le levier au cliquet. Il abaisse le cliquet et le maintient en contact avec la roue dentée quand le levier est basculé en position fermée. Il relève également le cliquet quand le levier est basculé en position ouverte. A droite, ce ressort a été dessiné sous Onshape avec la fonction Helix.
Design
Nous nous sommes d’abord attaqués au problème d’usure de la came. Cette usure provient du frottement entre la came du levier et l’indent du cliquet, nécessaire pour passer le levier de la position fermée à ouverte. Ces deux éléments ont donc été supprimés au profit d’un ressort de torsion. Celui-ci est imprimé avec le levier et s’emboite dans le cliquet. Ainsi, les deux pièces sont reliées et le cliquet peut passer de la position fermée à ouvert quand le levier est basculé à droite, sous l’action de ce ressort.
Ensuite, quand le levier est basculé à gauche vers la position fermée, le ressort entraine aussi le cliquet. De même, il maintien le cliquet en contact avec la roue dentée pendant la rotation du poignet. La partie basse du cliquet de la version #1 n’est plus utile et est donc supprimé.
Le gros atout de ce ressort de torsion en comparaison du ressort de compression précédent est que, grâce au mouvement de son point d’accroche sous le levier, il génère des efforts très faibles, vers le haut pour maintenir le cliquet hors de la roue en position ouverte, et vers le bas pour ramener le cliquet en appui sur la roue en position fermée. Ces efforts faibles limitent les risques de rupture et d’usure dans toutes les situations.
Observations après impression et assemblage
Après assemblage, le système tel qu’imaginé fonctionne à nouveau sans encombre. Cependant, nous nous sommes rendu compte que le ressort ne génère pas assez d’effort pour relever le cliquet quand celui-ci est en appui « sous une dent » de la roue dentée. De même, en position fermée, lors de la rotation du poignet, la roue dentée touche le ressort et l’abîme.
Il faut alors apporter quelques ajustements finaux.
Version finale et finitions
Dans sa version finale, les positions des cliquet et levier sont éloignées de la roue dentée de quelques millimètres pour éviter le contact en le ressort et la roue dentée. La came de la version #1 est également réintroduite pour aider à relever le cliquet (l’extraire des dents de la roue) quand le levier passe en position ouverte. Le ressort de torsion prend alors le relais pour conserver cette position :
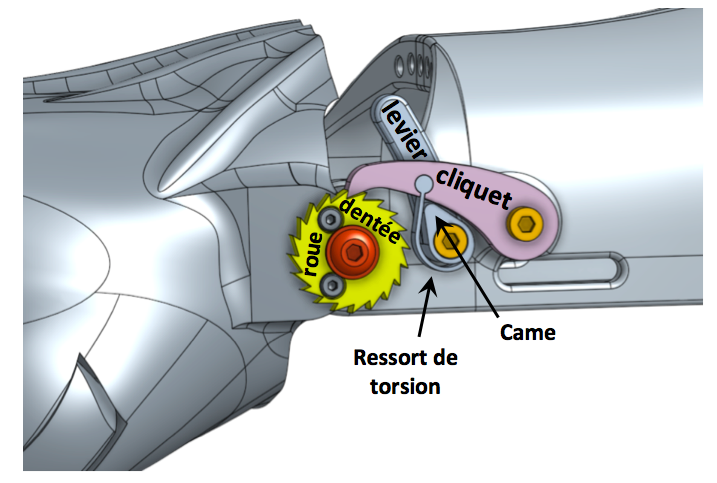
Version finale du « Wrist lock system ». La came est réintroduite mais cette fois uniquement pour relever le cliquet de la position fermée à ouverte. Le ressort de torsion verrouille ensuite la position ouverte pour ne pas user prématurément la came.
Après assemblage, cette version est adoptée.
Finitions
Une fois le design fonctionnel validé, deux finitions sont apportées :
- Une rondelle sur la roue dentée pour protéger Nathalie de tout contact avec les dents
- Un capot amovible pour ne laisser que le levier d’apparent.
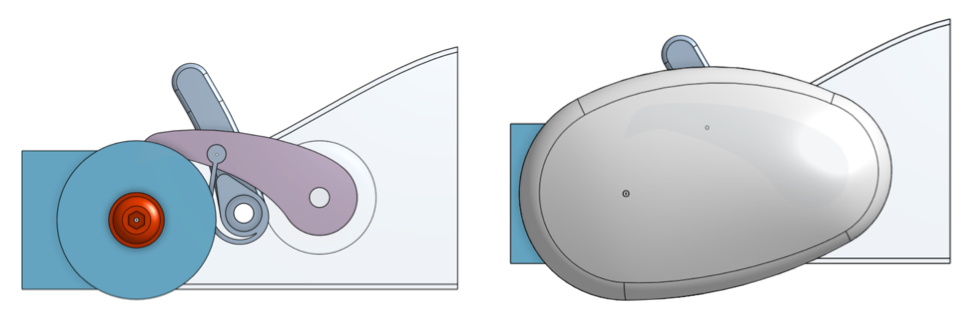
Finitions apportées à la version finale du « wrist lock system ». A gauche : une protection pour éviter tout contact avec la roue dentée. A droite : un capot amovible pour ne laisser que le levier d’apparent.
Commentaires récents